
成像子系统
成像子系统包含可见光相机、激光补光器、测距仪和环境监控相机等设备,完成对人群目标的图像成像,为微波系统的跟踪提供视频数据和距离信息,以及大视场环境监控图像。
2024-08-01


系统介绍:
在航空航天、风洞试验、工业生产、汽车测量等领域,往往都会涉及到六自由度位姿测量的问题。模型位姿测量系统是我司自主研制的高精度三维测量系统,通过两台工业相机构成基本测量单元(双目测量站),同步采集模型表面被测点的运动过程图像,基于双目视觉的三角测量原理计算被测点的三维坐标,可获得被测物体的空间六自由度位姿参数。
典型案例一:
模型在2.4m×2.4m×1.0m的范围内自由运动,双目测量站通过光学窗口玻璃实时采集模型上的靶点图像,并对靶标图像进行分析获得模型的空间六自由度位姿参数(俯仰角、偏航角、滚转角、空间位置)。
测量精度:≤ 0.01°。
测量频率:80Hz实时测量。
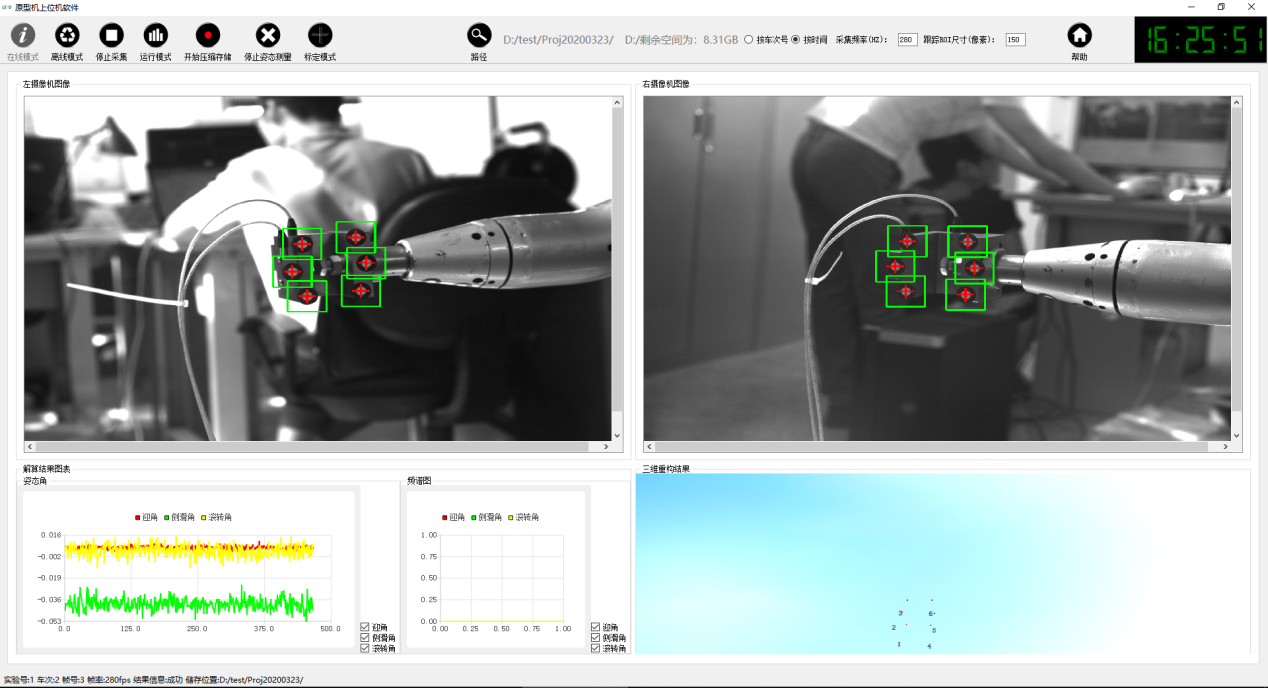
模型靶点的采集及解算效果图
典型案例二:
模型在200m×1m×1m的范围内高速飞行,多套双目测量站沿模型飞行方向布置,在测量前完成标定、基准坐标系建立与全局关联,测量站相机获得模型图像,通过识别模型表面靶点解算模型的空间六自由度位姿参数(俯仰角、偏航角、滚转角、空间位置)。
单站测量精度:优于0.3mm。
全局关联精度:优于1mm。
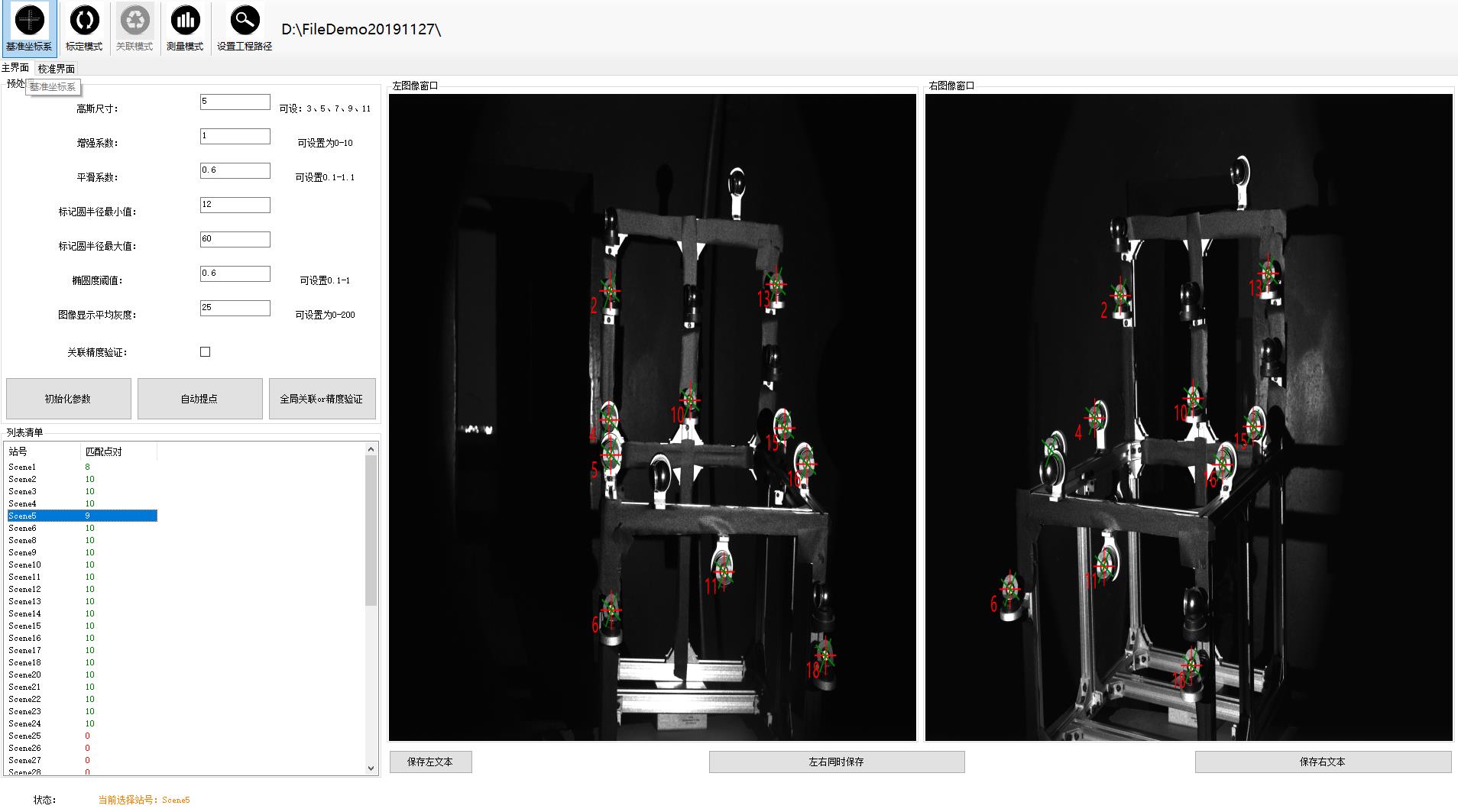
多设备关联计算效果图
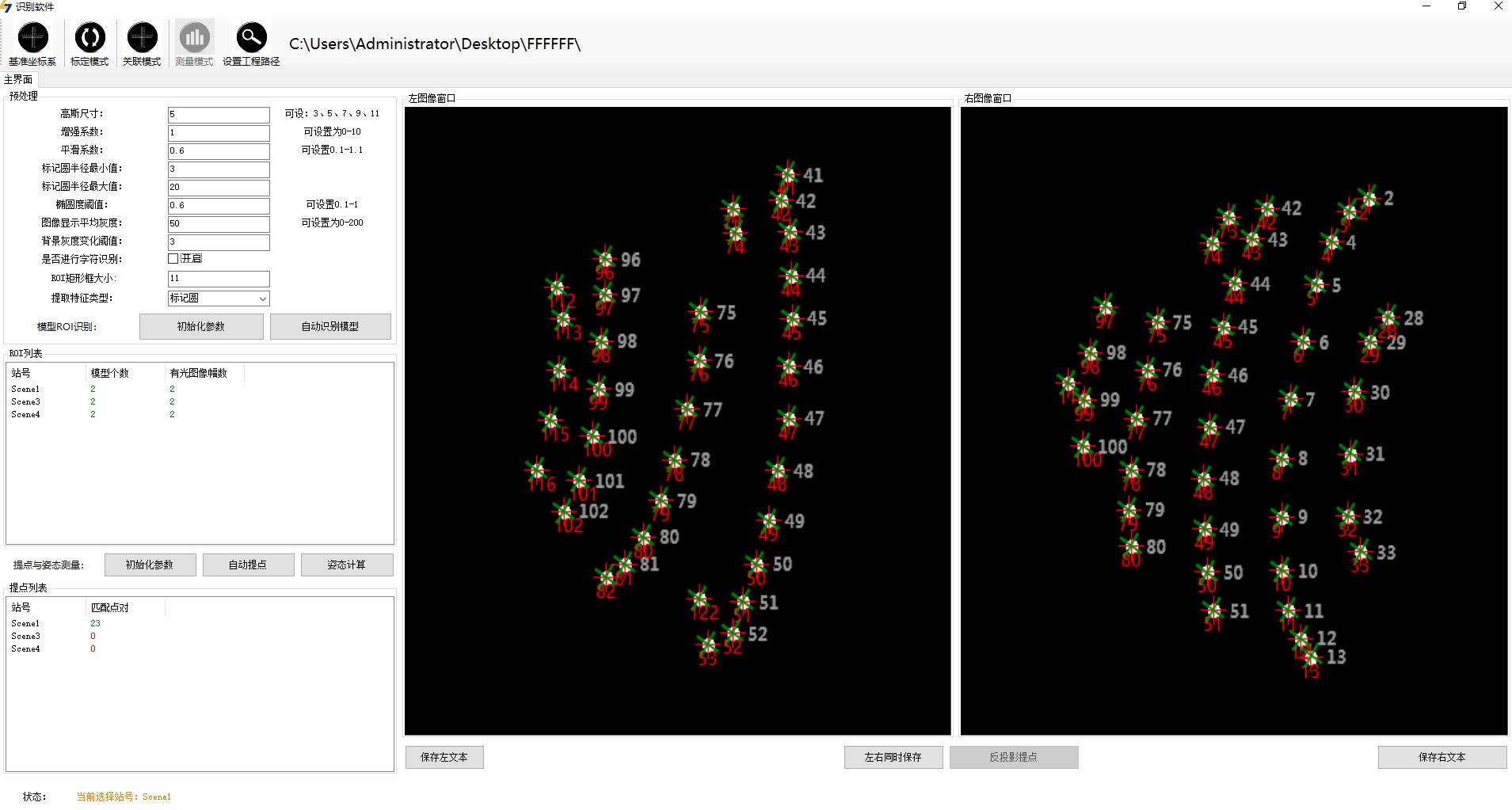
靶点识别计算效果图
更多应用






